
včera jsem si dal odpočinkový den co se nimrání v jemné mechanice týče a vytvořil něco, co jsem plánoval už dlouho - jednoduchý generátorek STEP/DIR pulsů, který mi umožní točit krokáčema i bez otravného bootování písíčka a to prosím pěkně i s akcelerací
(pokud nevidíš obrázek kompletní, klikni zde)
Funkci je asi nejlépe vidět na videu níže, nicméně shrnu hlavní fičury:
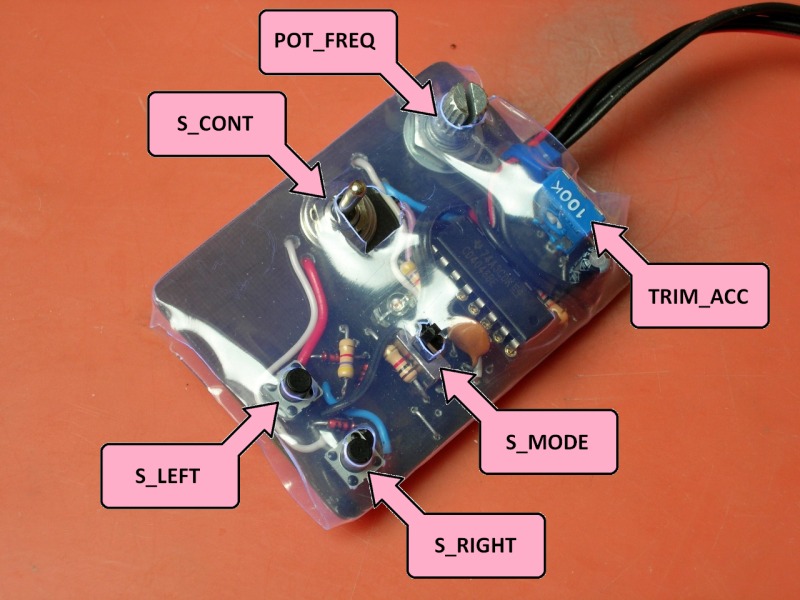
- směrová tlačítka (S_LEFT / S_RIGHT) pro ovládání ve stylu MACH3 joggingu či pro jemné krokování
- on-off-on přepínač (S_CONT) pro permanentní chod (původně jsem ho na schematu nazval S_PERM, ale rozmyslel jsem si to
- plynule nastavitelná frekvence krokování (POT_FREQ)
- nastavitelné plynulé zrychlení (TRIM_ACC)
- dva módy zastavení (S_MODE): okamžité či plynulé (zde je v mém obvodu jedna dost zásadní chyba, kdo jí vidí už teď, má bod
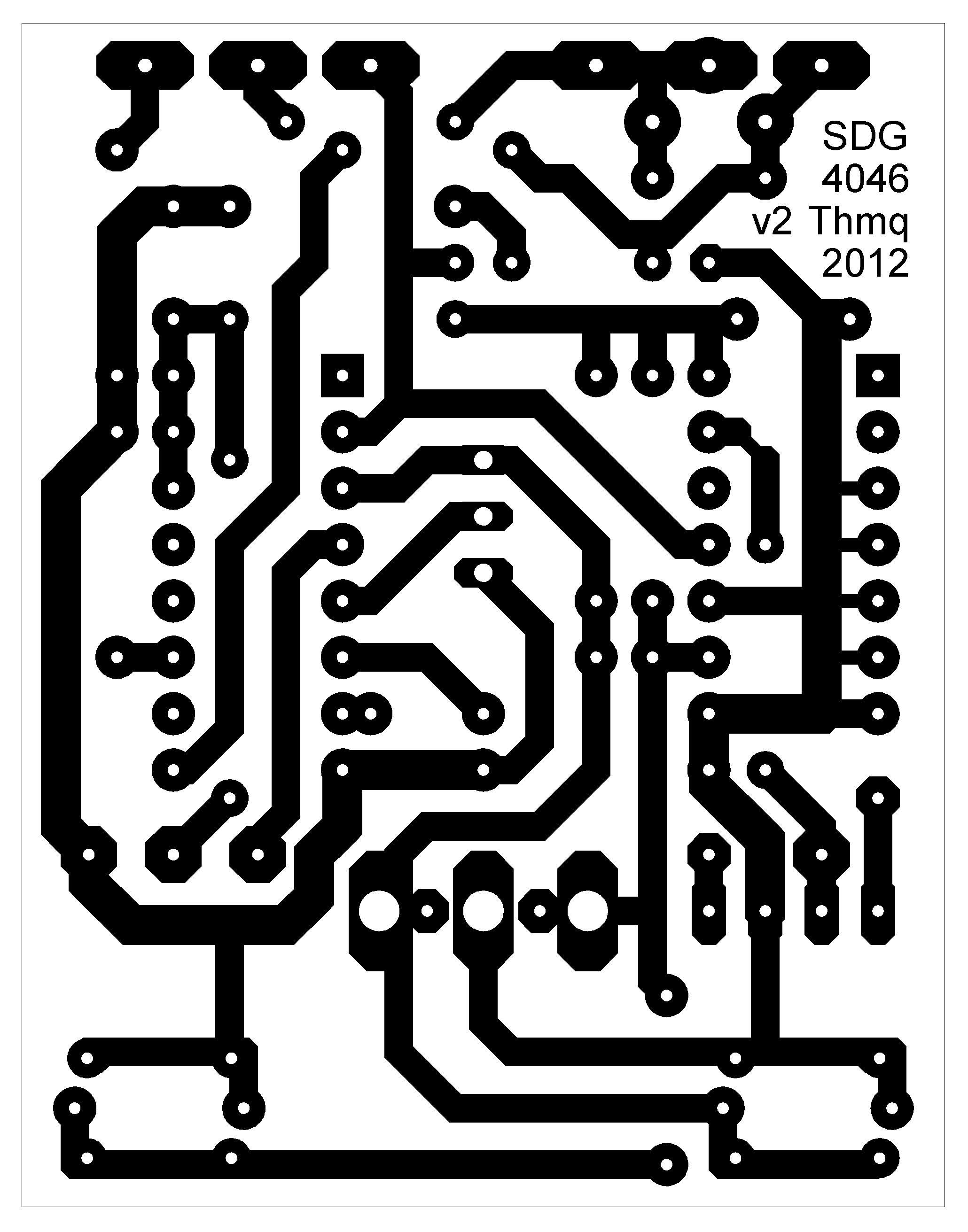
Obvod využívá luxusní VCO obvodu 4046 (plus je ještě využit PHASE COMPARATOR 1 coby invertující buffer), samotný step generátor včetně akce/dekce-lerace sestává ze šesti součástek, diodová logika přidává ovládání a změnu směru a pak už je tam jen signalizační LEDka (ještě by se asi slušelo filtrovat napájecí napětí kondíkem mezi zemí a +5VDC).
Tak, jak to vidíte na schématu, to má při napájení 5.4V:
- klidový proud 2.2µA
- provozní proud 3.8~7.5mA (podle nastavené frekvence a směru)
- frekvenční rozsah 0~20kHz (pro šťastné majitele micro-stepujících driverů je to určitě málo, rozšíření je ale jen o zmenšení hodnoty C1, teoretické maximum je podle 4046 datasheetu při napájení 5V je min. 400, typ. 800 kHz, zatím jsem neověřoval).
Ke zmíněné chybě: pomalé zastavení funguje správně jen v chodu doleva, v chodu doprava je motor po puštění tlačítka roztáčen v protisměru (neboť dojde ke změně hodnoty na výstupu DIR), což je myslím trochu v rozporu s myšlenkou plynulého zastavení
DEMONSTRAČNÍ VIDEÍČKO
Popisek k videu:
(pokud nevidíš obrázek kompletní, klikni zde)
Pár dalších fotek..
Hezký zbytek neděle, T.





{kind=link}
{kind=link}
{kind=link}